This week was heavily focused on sensor research. We needed to know everything about sensors that might be useful to us in the future. I centered my research on accelerometers and ultrasonic sensors. I took notes on my research and shared them with the rest of my group. Those notes can be viewed here:
https://docs.google.com/a/erhsnyc.net/document/d/1IDusj62JcVtWjOUq0Q2_YyC9YIXPkqSnfm2RgsoXeBU/edit
Next week will be focused on both the Linux SDK and the cameras in the drone. Specifically, I will see, along with other members of my group, how the cameras work with the SDK.
- Guilherme Dias
Monday, March 9, 2015
Week of 3/2/15
AR Drone
Notes:
- Quadrotor UAV with each opposite pair or rotors turning clockwise, the other turning counterclockwise
- Indoor and outdoor configurations
- Powered by brushless engines with three phases, microcontroller
- Automatic detection of blade stopping, stops the all rotors
- Sensors consist of many sensors below the hull
- 6 DOF, MEMS-based inertial units used for pitch, roll, yaw
- Ultrasonic sensor for altitude control
- Camera aiming towards the ground/front facing 90 degrees
- 3 DOF with 3 axis magnetometer and pressure sensor
- Tilt sensors used for hovering and stabilization
Accelerometer:
- electromechanical device used to measure acceleration forces
- movement (vibration) of the sensor creates voltage, which changes the output
- how they work:
- piezoelectric effect: microscopic crystals that get stressed by accelerative forces → creates voltage
- can have two microstructures next to each other → they have capacitance between them → when one moves, capacitance changes → can convert capacitance to voltage using circuits
- can analyze tilt and movement of the drone
- can sense if the drone is falling/crashing
- drone can react if it falls (security measure)
- analog vs digital (based on hardware)
- analog: outputs voltage continuously in proportion to acceleration
- digital: will produce a square wave; acceleration determines amount of time for which the voltage is high
- for 3d movement, we need either a 3 axis accelerometer or two 2 axis accelerometers mounted at right angles
- for a fast moving machine, we need an accelerometer with a larger bandwith (amount of times per second we can get a reliable reading)
Ultrasound Sensors:
- measure properties of sound waves with frequency above human audible range
- based on: time of flight → senses distance; Doppler effect → senses velocity; attenuation of sound waves (combined effect of scattering and absorption (conversion of sound energy to other forms of energy)) → sense directionality
- can detect clear or shiny objects that other sensors do not pick up
- measurements are extremely sensitive to temperature and angle of target
- if transmitting and receiving transducer are used next to each other, the distance calculated will be twice the actual distance
- transducer takes some time to switch between modes (sending and receiving), which causes a problem for short distance measurements
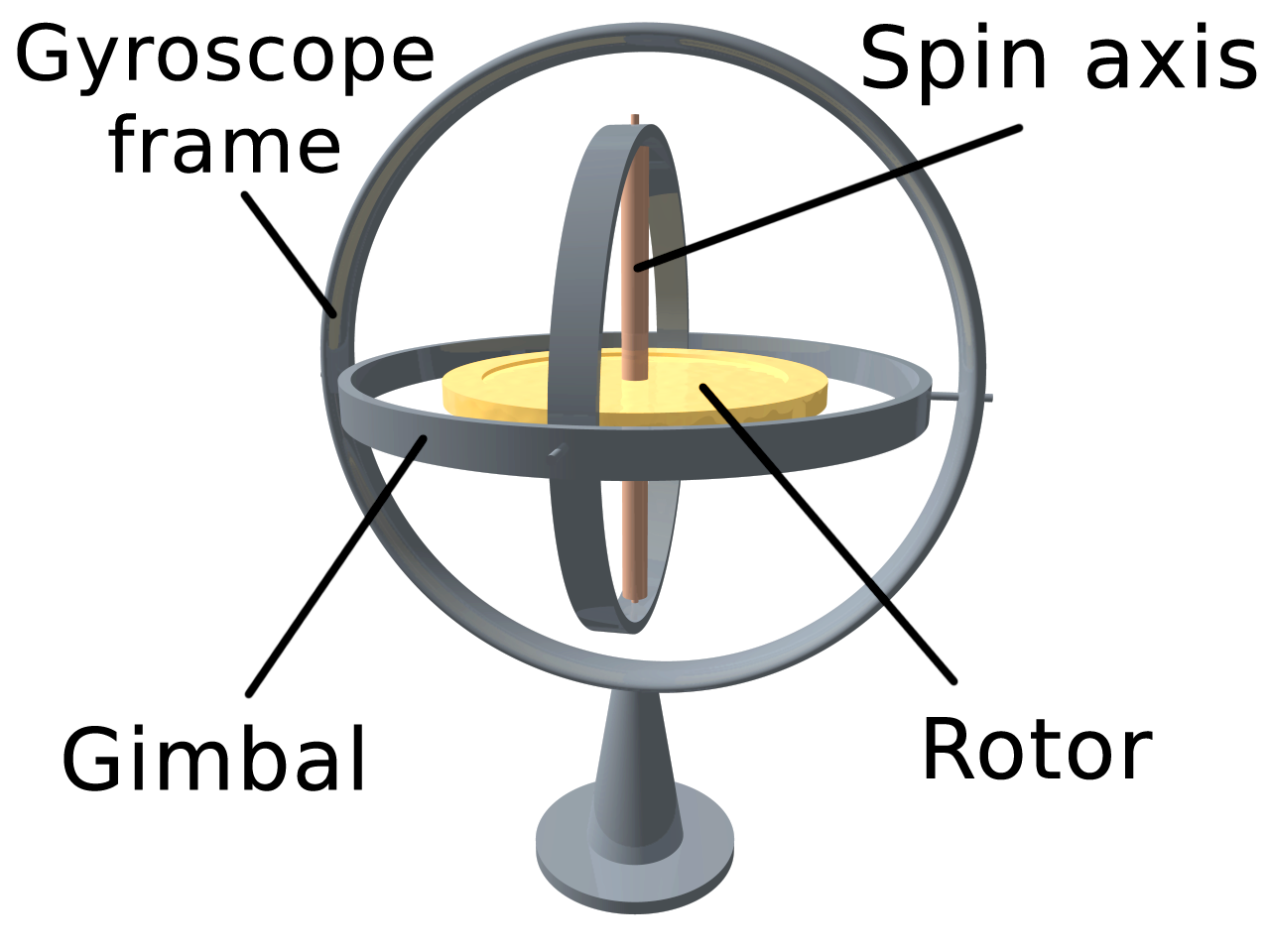
Gyroscopes:
- https://www.youtube.com/watch?v=cquvA_IpEsA - Basic info
- A gyroscope is a device with angular momentum used to capture orientation
- Gyroscopes maintain its orientation in space
- Used by aircrafts to control orientation
- Possible Gyroscope sensors can be used, rather than the physical
- Gyroscope will keep its orientation, resisting any outside force to change
- Consists of a central rotor within a gimbal
- Gyroscopic Precession https://www.youtube.com/watch?v=GeyDf4ooPdo
Magnetometers:
- Two purposes: “to measure the magnetization of a magnetic material like a ferromagnet, or to measure the strength and, in some cases, the direction of the magnetic field at a point in space”
- “Since magnetic flux density in air is directly proportional to magnetic field strength, a magnetometer is capable of detecting fluctuations in the Earth's field.”
- Magnetometers detect distortions in the magnetic flux which i
- 3 axis magnetometer 6° precision
- “With a 3D magnetometer, the AR.Drone 2.0 knows its precise orientation with respect to the smartphone, which becomes the reference point. The pilot no longer needs to care about the orientation of the AR.Drone 2.0's front camera, which will accurately track the smartphone's motion and tilt.
- ‘Relative Flight’ mode = conventional flight mode. This disables Parrot AR.Drone 2.0's magnetometer. The pilot manages the quadricopter's orientation with no assistance.”
- tells the drone precisely how it is oriented respective to the control device
- measures magnetic flux density at point where sensor is located. The max. distance the magnetometer can detect the sensor is directly proportional to the cube root of the magnetometer's sensitivity

{kind=link}
*****
NOTES:
TUMS FLYING THROUGH A STRAIGHT LINE AND AVOIDING OBSTACLES-
****
Thursday, January 22, 2015
Week of 1/19/15
Progress: There hasn't been much progress lately (see Problems section). We are still setting up the spiri simulator and the container is ready for printing, although that has not been done yet. However, we found an open source program called OpenCV (Open Source Computer Vision)* that may be able to help with image recognition using the camera that is built into the Spiri, so that the drone can navigate throughout the school. The software seems to have an extensive library available in many languages, as well as a forum in which anyone can post questions and ask for help. This seems to be promising, but we need to try it out before we can determine if it is good enough for what we want.
Problems: Our group is not very well organized and the project is moving along very slowly. This is a major issue that we need to fix very soon.
Plan: In this coming week, we will print the container, fine-tune it, and hopefully finalize it so that the project can move along. Also, we will experiment with OpenCV to see whether is satisfies our needs or not. Furthermore, we hope to have the spiri simulator running sometime this week so we can start learning how it works and have a working demonstration of both the simulator and Gazebo by the end of the week.
Meanwhile, we will attempt to acquire the drone, and since the dev team is not responding, we may need to just buy it as soon as possible. Moreover, Gui will continue to learn the basics of SLAM on the side in case we need to turn to that option, but that would be an extreme case, because it is both difficult to learn and implement.
*OpenCV website: http://opencv.org/
Problems: Our group is not very well organized and the project is moving along very slowly. This is a major issue that we need to fix very soon.
Plan: In this coming week, we will print the container, fine-tune it, and hopefully finalize it so that the project can move along. Also, we will experiment with OpenCV to see whether is satisfies our needs or not. Furthermore, we hope to have the spiri simulator running sometime this week so we can start learning how it works and have a working demonstration of both the simulator and Gazebo by the end of the week.
Meanwhile, we will attempt to acquire the drone, and since the dev team is not responding, we may need to just buy it as soon as possible. Moreover, Gui will continue to learn the basics of SLAM on the side in case we need to turn to that option, but that would be an extreme case, because it is both difficult to learn and implement.
*OpenCV website: http://opencv.org/
Monday, December 29, 2014
Progress Report: Week of 12/18
Progress:
This week we focused primarily on integrating linux into our project.
Linux is the operating system that the spiri drone runs on, so it is essential for
the advancement of our project. So far we have figured out how to run linux on
a mac computer. This can be done through a bootable usb drive. By putting the
Linux disk image on a usb, we were able to boot directly from the drive by
holding down the option key while the mac is starting up. This has allowed us to work on mac computers
instead of having to use the one linux computer that Elro has. Gui and Vasil
watched many Gazebo tutorials on their website (http://gazebosim.org/tutorials).
Arianna Vetrano Sebastian worked on the container and tried to make it as
light as possible by cutting out sections of the container that is not needed.
Problems Solved:
Sebastian and Arianna solved the problem of how to make shave down the
weight of the container so that we could increase the amount of things that
could be carried during flight.
Lessons learned:
Arianna and Sebastian learned that we can make the container a bit
lighter by adding holes to it since it is excess weight that really does not
have any use.
Problems:
Connecting to wifi has been an issue for us because the schools wifi network
is very difficult to connect to. Also, nothing on the linux computers are
saved. This is because of the nature of the USB drive.
Drives must be configured to boot with persistence in order for basic files
and inputs to be saved on the computer. We are still figuring out how to boot
with persistence.
Plan:
Ben plans to download Linux onto a PC computer instead of using it on
the Mac. Gui and Vasil plan on continuing to learn Gazebo since that
requires times and begin developing algorithms. Arianna and Sebastian
plans on printing out the cylindrical container and figuring out the more
effect way of attaching it to the drone. If we do not get a response from
our correspondence by the time we get back to school, we will try calling them
up. We will need the Spiri as soon as possible.
Monday, December 22, 2014
12/11/14 Progress Report

Container
Progress:
So far we have brainstormed multiple designs for the container. Originally we were thinking of a cube-shaped box, however we realized such a container might not be the most practical for transporting paper. As of now we are sticking with a cylindrical shaped container where we can roll up papers without needing to fold and wrinkle them. Although we have not yet received exact dimensions of the body of the drone, we were able to estimate them with measurements we do have. Using these, we now can now get a better scene of size and have also begun to model the container on Sketchup.
Problems Solved:
After realizing that the top of the drone have ventilations, we needed to figure out a way to situate the container so that they would not be blocked. This week we solved the problem and decided to add stilts that will lift the cylindrical container up above the ventilations.
Lessons learned:
One lesson we learned was that always think one step ahead. We should have emailed the company and asked for specific questions such as the dimensions for the body so that what we are creating can be more precise.
Problems:
One problem we now face is how we will attach the stilts to the body of the drone. During our group presentation, we received many helpful suggestions on how we can go about this. Some suggestions include attached the silts to the USB port or the four screws (shown in the diagram below). Another problem is that we still do not know have the drone so once we print out the container we cannot fully test it out.
Plan:
Our plan for the next week is to print out our container and figure out a way we can attach the stilts to the drone. In addition, we hope that our correspondence will get back to us with the papers so that we can get the drone.
Friday, December 5, 2014
Week of 12/01/14 Progress Report
Progress: This week was an important week. We started learning about ROS, which will be useful when we need to program the drone, and we designed a possible container for our drone. However, the most important part of this week was contacting the developers of the Spiri. We were able to email them our questions and tell them about our project, and judging from their answer, they seem eager and willing to help us with our project in hopes of creating more " educational partnerships." They offered us a discount on the drone, which helps with our budget problem, and they offered technical support whenever we need it. They also published all of the information that we needed about Spiri (including the Spiri data sheet) and a simulator for its API, which will be very useful to us while we wait for the Spiri to arrive.
Problems Solved: One of the major problems that we solved was the budget, which the Spiri developers helped with by offering a discount. We were also able to distribute more tasks among ourselves, which will hopefully speed up the project a little bit.
Lessons Learned: We learned that communication is very important. By finally contacting the Spiri developers, we realized that our project could move along much faster with their help. Luckily, they are willing to help, and so it is crucial to maintain contact with them from now until the project is complete.
Problem: The main problem right now is that it is taking a while to learn ROS. It seems to be a little complicated and advanced, and it will certainly delay our project a little bit. We are also working on trying to get a simulator for ROS. Possible candidates for software that we might use are a program called Webots and the Spiri simulator.
Plan: In order to counterattack the delay that was caused by ROS, we put 3 people responsible for learning it, while the other 2 members of the group take care of any other task that relates to the drone. This will hopefully make learning ROS a little faster.
Sources to learn ROS:
1. http://wiki.ros.org/
2. https://www.youtube.com/watch?v=_WyuAZ1SuTI&index=1&list=PL3064BF19A4F4CD1F
Problems Solved: One of the major problems that we solved was the budget, which the Spiri developers helped with by offering a discount. We were also able to distribute more tasks among ourselves, which will hopefully speed up the project a little bit.
Lessons Learned: We learned that communication is very important. By finally contacting the Spiri developers, we realized that our project could move along much faster with their help. Luckily, they are willing to help, and so it is crucial to maintain contact with them from now until the project is complete.
Problem: The main problem right now is that it is taking a while to learn ROS. It seems to be a little complicated and advanced, and it will certainly delay our project a little bit. We are also working on trying to get a simulator for ROS. Possible candidates for software that we might use are a program called Webots and the Spiri simulator.
Plan: In order to counterattack the delay that was caused by ROS, we put 3 people responsible for learning it, while the other 2 members of the group take care of any other task that relates to the drone. This will hopefully make learning ROS a little faster.
Sources to learn ROS:
1. http://wiki.ros.org/
2. https://www.youtube.com/watch?v=_WyuAZ1SuTI&index=1&list=PL3064BF19A4F4CD1F
Thursday, November 20, 2014
Week of 11/17/14 Progress Report

This week was focused, again, on research. Since choosing our drone we have discovered that we need to learn more about its operating system and how we are going to be able to program it, so we started learning about ROS (Robot Operating System) using this document: http://www.cs.utexas.edu/~todd/cs378/slides/Week8a.pdf.
We also took it upon ourselves to learn more about the drone that we chose and its components. We used this website to accomplish this task: http://linuxgizmos.com/linux-powered-quadrocoptor-has-three-cameras/
Moreover, we started looking more into wireless charging, because we believe that it can be much more efficient in out project if we charge the drone wirelessly instead of having it dock at a station every few minutes to recharge. The following 2 websites were used to research wireless charging: http://www.wirelesspowerconsortium.com/technology/magnetic-resonance-and-magnetic-induction-making-the-right-choice-for-your-application.html
http://powerbyproxi.com/wireless-charging/
We also completed the system architecture for our project. It describes how every component of the project is related and will hopefully be useful to us in the future when we really start developing the project. Also, we started developing the system block diagrams in order to explore different paths to accomplish our ultimate goal, which is to have an efficient and easy to use drone delivery system. Those diagrams are not complete, but they will be in the coming days.
However, our project did encounter some obstacles. First, when we chose the drone, we only considered its use for our project and failed to take into account the price. While it is not over our budget, it does come close to our limit. It is now priced at around $900.00. Our plan to solve this issue is to find parts that we could make ourselves with the 3D printer, such as the protective ribbons that can be ordered with the drone, thus reducing the cost and allowing us to tailor these parts to our own liking/need.
Our other problem, and perhaps the most important, is the fact that we are behind schedule. By now, we should already be designing our project and starting to develop it, as shown in the gantt chart*. Ideally, in a couple of weeks, we would start designing the algorithm, but at this rate, it might be tough to do that. Our plan is now to break up the tasks that still need to be done into smaller, more manageable portions, and then distribute them between group members so that they can be done more quickly. Hopefully, if our plan works, we should be within our schedule in 3, maybe 4 weeks.
Link to Progress Report Presentation: https://docs.google.com/a/erhsnyc.net/presentation/d/1MeY274P74Ll9ivr7eyqvbRyb9BDD5HLxfVg7-sqmIxE/edit?usp=sharing
*I know the gantt chart is hard to see, but we ran into some technical difficulties with the software and could not get a better image.
Subscribe to:
Posts (Atom)